|
| 
| 
|
|
|
| (a)
| (b)
|
|
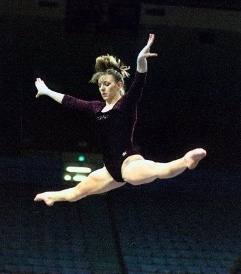
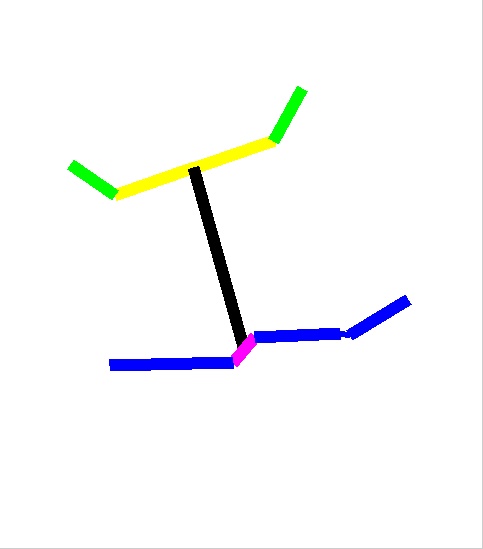
| Figure 1: the challenge is to take an input image (a), and recover the body
configuration in (b), without any assumptions about pose, clothing, scale or
background clutter.
|
The goal of this work is to take an image such as the one in
Figure 1(a), detect a human figure, and find the
configuration of parts (b). This is a very difficult problem, partly
because human bodies are versatile, presenting a wide range of pose
and aspects, many including self-occlusion, and partly because
variations in clothing and background clutter deny a simple appearance
model.
We tackle this problem by explicitly detecting body parts from bottom-up and
then assembling them into configurations Without restrictions in pose,
appearance, or background clutter, a tree-based model no longer suffices (cf
the discussions in our earlier paper on
segmentation-based people finding). Additional sources of information, not
provided by tree based models, are required to succeed. For example, the
symmetry of clothing is a powerful cue to constrain limb appearance. As another
example, in Figure 1, what reveals the body position to us are the connection
between the two upper legs and the relative geometric relationship between arms
and legs, both of which are not in the traditional tree-based model.
It is an open question what models can express sufficient constraints
and are computationally feasible. In this work, we develop a strategy
that exploits a rich set of cues, defined on arbitrary pairs of parts,
to constrain body configurations. We learn these constraints from
empirical data and use Integer Quadratic Programming (IQP) to
find the most probable configurations.
The IQP framework allows incorporating much more
information than dynamic programming on trees, and can handle a
much larger set of candidate parts than a brute-force search strategy.
Our approach is outlined in the following figure:

| 
| 
| | (a)
| (b)
| (c)
|

| 
| 
| | (d)
| (e)
| (f)
| |
Figure 2: the processing pipeline. Given an input image (a), compute an edge map
(b), break this into segments and compute a constrained Delaunay
triangulation (c), identify part candidates by exploiting parallelism of
part boundaries (d), find a good configuration using Integer Quadratic
Programming over pairwise constraints between body parts (e), use the
labeled segments and stick figure to find an approximate segmentation of the
figure (f).
|
Detecting Parts using Parallelism
Our part detector
is based on the following key observation: parts of a human
body, or of an articulated object in general, are mostly characterized
by a pair of parallel line segments. Parallelism or
Ebenbreite, known from the early days of the Gestalt movement, is a
fundamental principle in human vision and its perception is commonly known to occur early in the visual pathway.
We start with the construction of the Constrained Delaunay Triangulation graph from bottom-up.
This gives us a discrete graph of approximately straight edge segments.
Then we train a logistic
classifier on a pair of edge elements to compute the probability of
them forming the boundary of a body part. The features we use for parallelism include angles, line length and alignment of centers.

|
|
| (a) | (b)
|
| Figure 3: detecting parts from bottom-up, using a logistic
classifier on the basis of a discrete CDT graph representation. (a) shows the
(color-coded) top 10 part candidates in the example image, and (b) shows all the
candidates.
|
One advantage of using the CDT graph for part detection is that it is
scale-invariant. We do not make any assumption about the absolute scale
of the parts. Long horizon lines remain
undivided in the CDT graph, and they form a single candidate. Consequently,
there are only about one hundred candidates, in total, in the example image.
This is in sharp contrast with top-down approaches, where one may have to
consider millions of possibilities, searching over position, orientation and
scale.
Pairwise Constraints between Body Parts
Without any assumption about the appearance of body parts, it is impossible to
detect them in separation. As we can see in Figure 3, there are a lot of false
positive detections. The nature of the problem is such that, compare to
low-level saliency, global configuration consistency is much more important.
How do we model the global configuration consistency?
Given the set of candidates {ci}, we try to assign to them a
set of part labels {li}, where {li} are
from the canonical 9-part body model (torso plus 8 half-limbs). For a pair of label assignments
(l1,c1,l2,c2),
we use the following set of constraints:
- scale consistency: although length of a part could be
foreshortened, width is a reliable estimate of its scale, and if we label one
candidate part as torso and another as upper arm, the relative widths of these
two candidates have to be compatible (as dictated by their labels).
- appearance consistency: brightness/color are similar to each other
for some pairs of parts (such as between the two lower legs) but not others.
- orientation consistency: for some pairs of parts (such as upper leg and lower leg), the difference between their orientations tends to be small, and rarely more than 90 degrees.
- connectivity: the connectivity constraint includes the adjacency between adjacent body parts in a tree model
(most commonly used cues in body configuration, such as between torso and upper leg),
the V-shape cue (i.e. the adjacency between two upper
legs) and smooth connection between non-adjacent parts (e.g. arms and
legs should be connected by a smooth path of edges; this is useful when toro or
other parts are missing or cannot be reliably detected).
We estimate the mean and variance of the cues above from a set of 15
hand-labeled images. The cues are then normalized by its variance (an estimate of
its relative importance).
It is worth noting that we include a few non-traditional configuration cues in
our model, such as V-shape, symmetry of appearance, and connectivity between
non-adjacent parts. Preliminary quantitative analysis shows that these cues
contain a significant amount of information about body configuration. Such
constraints, however, are not in a tree model and cannot be exploited by
dynamic programming. Instead we use an Integer Quadratic Programming
formulation, where arbitrary pairwise constraints can be incorporated.
Correspondence with Integer Quadratic Programming (IQP)
Suppose that there are m candidates (m ≈ 100) and n
labels (n=9). Let x be a binary vector of length (mn) which
indicates the assignment of labels to candidates. The pairwise constraints
above can be written down in a quadratic form, and to find the best
configuration we solve the following quadratic program:
| min Q(x) = x' H x + c' x
| | s.t. A x= b
|
where H encodes the pairwise assignment costs, c encodes unary
costs, and A specifies the constraints that x is a valid
assignment (i.e. there is a only one assignment for each label).
IQP is a well-studied computational framework. It is NP-hard; nevertheless
efficient approximations exist. We use a linear approximation scheme and it
performs well in our experiments.
|































