|
Introduction
Many things could change when tracking an unknown object, including shape, appearance,
scale, background as well as camera motion. Because of these variations, and
because of the inherent inaccuracies in each tracking step, errors accumulate
and drifting occurs. This makes it very challenging to track something
for a long period of time.
We re-cast tracking as a figure/ground segmentation problem, separating
foreground object from background in each frame. Temporal coherence cues
roughly locate the spatial support of the object; static image cues refine the
support, correct errors and compute an accurate object mask.
Temporal coherence cues
Every tracking paradigm maintains two types of knowledge about the object being tracked: what it is, being an image patch or a histogram of color and texture or its shape/contour; and where it is, estimated either at low-level (e.g. optical flow) or high-level (e.g. dynamics models).
For the what question, we take a simple approach, and maintain two
histograms of color/brightness values, one for the figure and one for the
background.
For the where question, many existing approaches track object center
only, by assuming that the object has a rectangular (or ellptical) isupport.
We go further and ask for a segmentation of figure vs background.
The where question becomes the following: given a figure mask in the
previous frame, use image information to estimate a figure mask in the current
frame. To do this, we compute CDT superpixels for
both frames and compute a correspondence/assignment between the two sets of
superpixels/regions, based on color and location. This
correspondence/assignment distributes region mass in the previous frame to the
current frame, hence carrying the figure mask in the previous frame into an
estimate of figureness for the current frame.
Combining static image cues
The temporal coherence cues give us a rough estimate of where the figure is in
the current frame. It is, however, never accurate, and errors are introduced,
resulting in blurry figure support.
We use static image cues in the current frame to correct these errors. Static
image grouping cues are summarized in a boundary map produced by the Pb
operator, combining brightness, color and texture contrasts. We combine
temporal coherence cues and static image cues in a conditional random field model to produce a final
figure mask.
Accurate figure and background masks make the template update problme easy,
with interference from clutter reduced to a minimum. We update figure/ground
histograms and scale paramters linearly.
Segmentation Makes Tracking Robust
As we will show in our demo results, segmentation can help deal with many
challenges in tracking, such as variations in appearance, pose, scale or
background scene.
| 
|
| Frame 1
| Frame 2
|
In this toy example, suppose we want to track a black object over a white
background. Segmentation is trivial in such a case, and we can "track" this
object whatever shape, scale or shade it changes into in Frame 2.
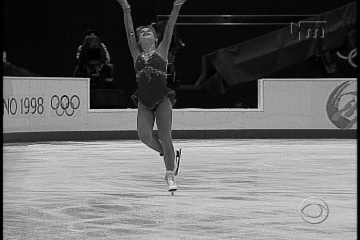
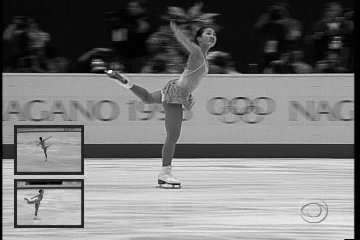
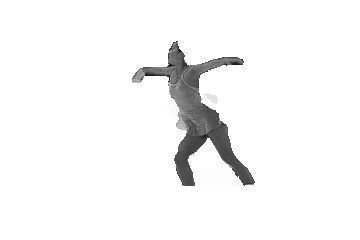
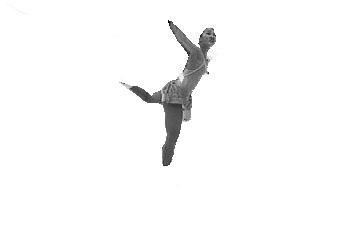
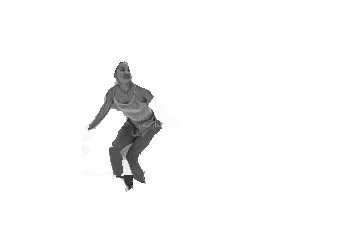
In this real-world example, we can track and (roughly) segment out the player
despite the crowded scene and partial occlusion. Segmentation in this case
works by combining multiple sources of cues: for region 1, appearance cue tells
us that it's not part of the figure; for region 2, spatial coherence cue tells
us that it is too far away; for region 3, it is close to the player and has the
"right" color, but there exists a strong contrast boundary near the player's
leg; for region 4, both boundary contrast and appearance cues are effective.
Sample Results
Video
Full tracks are available, encoded in xvid/divx4 codec.
|