Jointly Optimizing Placement and Inference for Beacon-based Localization
Charles Schaff,
David Yunis,
Ayan Chakrabarti,
Matthew R. Walter
[arxiv]
[code]
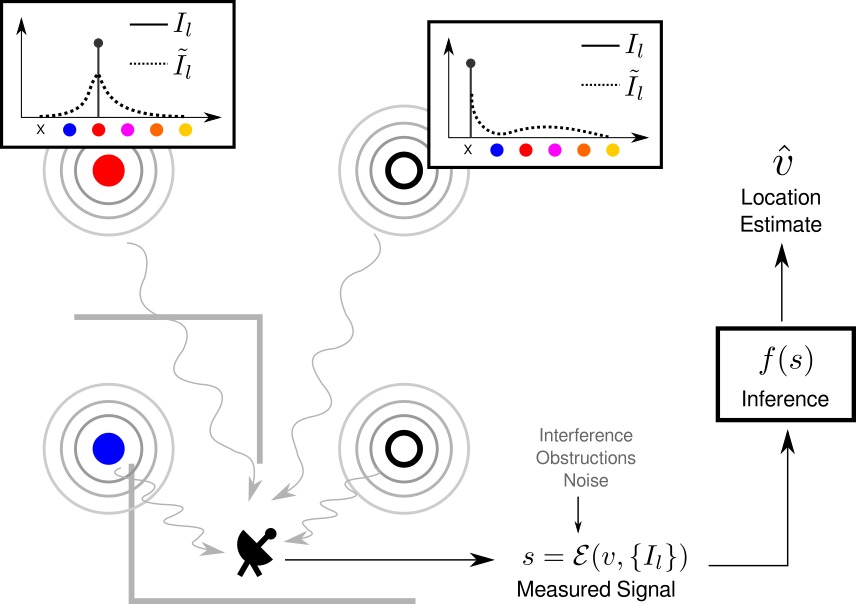
The ability of robots to estimate their location is crucial for a wide variety of autonomous operations. In settings where GPS is unavailable, range- or bearing-only observations relative to a set of fixed beacons provide an effective means of estimating a robot's location as it navigates. The accuracy of such a beacon-based localization system depends both on how beacons are spatially distributed in the environment, and how the robot's location is inferred based on noisy measurements of range or bearing. However, it is computationally challenging to search for a placement and an inference strategy that, together, are optimal. Existing methods decouple these decisions, forgoing optimality for tractability. We propose a new optimization approach to jointly determine the beacon placement and inference algorithm. We model inference as a neural network and incorporate beacon placement as a differentiable neural layer. This formulation allows us to optimize placement and inference by jointly training the inference network and beacon layer. We evaluate our method on different localization problems and demonstrate performance that exceeds hand-crafted baselines.
Supplementary Video: